- Papel
Para explicar a premissa básica deste controlo, precisamos de olhar para o desempenho do motor no mundo real e como um motor pode fornecer potência e torque, bem como estar sujeito a cargas e forças externas. Comecemos então pelo básico:
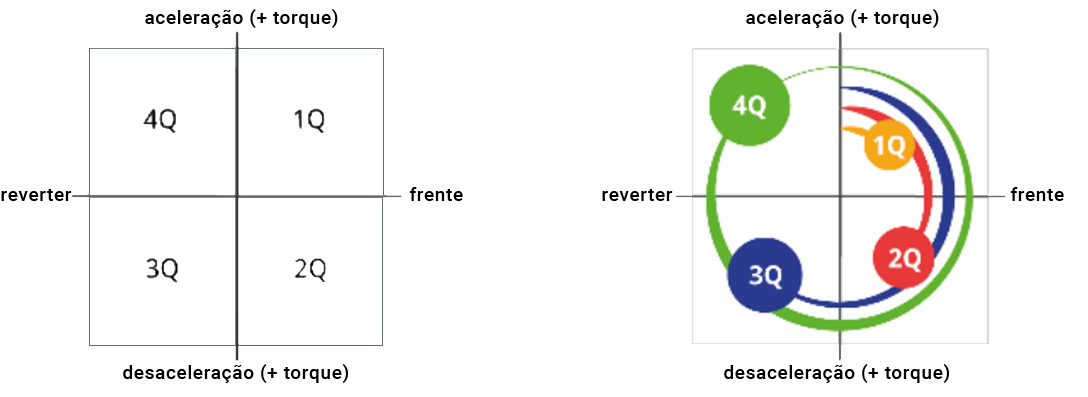
Quais são os quatro quadrantes do motor elétrico?
Se um motor estiver conectado a uma carga, então ele pode ser conduzido (ou acelerado) para a frente. Este é o 1º quadrante. Caso a carga seja desacelerada ou travada nesta direção (desacelerado), então este é o 2º quadrante. Se o motor desacelerara ou travar e passar a andar de marcha-atrás então este será o 3º quadrante. Finalmente se o motor é acelerado na posição inversa(marcha-atrás) então é o 4º quadrante.
Para simplificar um pouco, se observarmos a aceleração e desaceleração na parte positiva e negativa do torque é por vezes facilmente aplicável uma aplicação com o modelo 4Q (como pode visualizar no diagrama).
Tudo isto parece muito claro até analisarmos o controlo do motor com velocidade variável, aqui percebemos uma das maiores diferenças entre variadores de velocidade AC e variadores de velocidade DC. A habilidade de controlo quadrático requere uma componente elétrónica muito avançada no mundo do AC.
Se olharmos para os princípios fundamentais de um variador AC todos seguem a mesma linha de design. A alimentação num variador de velocidade AC é passada através de um díodo capacitivo básico onde através desse circuito é criado o Link DC que por sua vez é utilizado para alimentar o circuito PWM[IGBT's] responsável por simular uma saída trifásica de tensão e frequência variadas, mas mantendo-as sem desfasamento para que se produza um torque constante na saída.
Aplicar todo este processo num modelo quadrático permite um controlo fácil no quadrante 1 e 4, contudo, quando a carga sofre uma travagem, o motor funciona como um gerador e alimenta o circuito PWM de volta. Passando através do link DC e o link DC aumente proporcionalmente a tensão enquanto ocorre a paragem ou quanto maior for a carga de travagem. Não existe saída para esta tensão DC e provavelmente atingirá o seu limite. Se o variador tem um brake switch equipado, poderá ativar as resistências do circuito para reduzir a tensão, mas não é feito continuamente. Sem as
resistências e o
brake switch, o variador irá disparar.
Aplicando esta situação numa linha de produção, os variadores AC com as opções limitadas de travagem, irão certamente prejudicar a capacidade de desempenho.

Se olharmos para o circuito de potência de um variador DC, especialmente para o SPRINT PL / PLX RANGE, podemos verificar que utilizando uma alimentação AC para energiaz os tirístores, podem ser ativados ou desativados para produzir uma saída correta. Os tirístores são diretamente alimentados pela fonte de alimentação. Com um par de tirístores (PLX drive) o variador DC é capaz de operar em todos os 4 quadrantes com igual controlo e mantendo uma travagem contínua pelo tempo necessário ou continuamente. Este trata-se de longe de um método simples de controlo, mas muito supeior em tempos de capacidade de performance.
Como avaliar a sua aplicação?
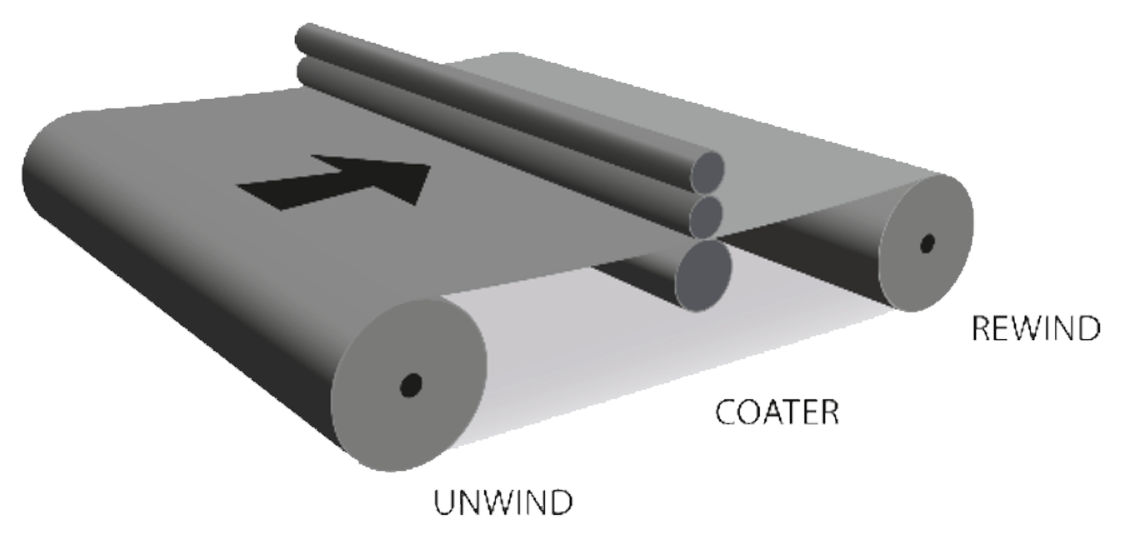
Para avaliar a sua aplicação basta calcular qual dos quadrantes necessitará de controlo sendo esta a parte fundamental para o design da linha de produção. Aplicando este princípio como exemplo e se olhar para um linha de produção com uma bobinadora, uma prensa ou revestidaor e depois rebobinando pode verificar que o bobinador requere uma travagem continua e que necessita de um controlo total nos
4 quadrantes.
A prensa ou revesidor podem ser guiadas, mas também podem ser verificadas pela rebobinação, então necessitará dos 4 quadrantes. Finalmente a rebobinadora, que normalmente só necessita de doius quadrantes para controlo, poderá estar sujeita a uma travagem quando é dado ordem de paragem. Com este exemplo é possível entender que análise de 4 quadrantes é esencial para uma boa linha de produção.
Obviamente existem outras formas de ultrapassar os problemas de um variador de velocidade AC, como exemplo os
variadores active front end e a partilha do
buss DC, mas
a
simplicidade
do controlo de 4 quadrantes num variador DC pode tornar as aplicações DC muito mais simples do que realmente são.
Tudo isto se tratam de relatos de aplicações onde o contolo de motores AC está a ser uma opção de substituição pelo controlo de motores DC. Existe uma tendência para simplificar demais o sistema ou complicar demais o design. Isto pode levar-nos a aplicações problemáticas ou a fracas performances.
Se tiver alguma dúvida sobre essas questões, vale a pena discutir connosco para que possamos aconselhá-lo da melhor solução.